


Abstract
This article demonstrates an approach that accelerates the prototyping phase of embedded systems design. It will illustrate how to utilize a hardware agnostic driver in combination with a sensor to make component selection much easier for an entire embedded systems. This article describes the components, the typical software structure of an embedded system, and the driver implementation. The subsequent article, “Leveraging a Hardware Agnostic Approach to Ease Embedded Systems Design: Driver Implementation,” will further detail the execution.
Introduction
Using a hardware agnostic driver allows designers to choose the type of microcontroller or processor to manage the sensor without a dependence on hardware. The benefit of this approach is offering the option to add software layers on top of the basic one provided by a supplier, as well as simplifying sensor integration. This article will use an inertial measurement unit (IMU) sensor as an example, but the approach is scalable to other sensors and components. The driver is configured using the C programming language and tested with a generic microcontroller.
Component Selection
IMU sensors are mostly used for motion detection and to measure the intensity of movements through accelerations and rotational speeds. The ADIS16500 IMU sensor (Figure 1) was selected in this exercise as it allows for a simplified, cost-effective way to integrate accurate, multi-axis inertial sensing into industrial systems, compared with the complexity and investment associated with discrete designs.
The main applications are:
- Navigation, stabilization, and instrumentation
- Unmanned and autonomous vehicles
- Smart agriculture and construction machinery
- Factory/industrial automation, robotics
- Virtual/augmented reality
- Internet of moving things
The ADIS16500 is a precision, miniature microelectromechanical system (MEMS) IMU that embeds a triaxial gyroscope, a triaxial accelerometer, and a temperature sensor. See Figure 2. It is factory calibrated for sensitivity, bias, alignment, linear acceleration (gyroscope bias), and point of percussion (accelerometer location). This means that the sensor measurements are accurate over a broad set of conditions.
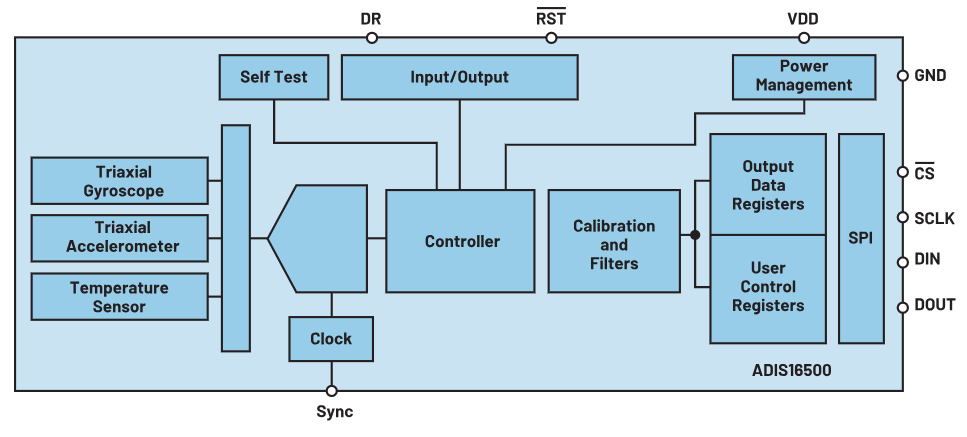
This interface allows the microcontroller to write and read the user control registers, as well as read the output data registers from where the accelerometer, gyroscope, or temperature sensor data can be acquired. For that reason, all the software and firmware required to manage the interface has been developed. Figure 2 shows the data ready (DR) pin. This pin is a digital signal that indicates when new data is available to be read from the sensor. The DR pin can be easily managed by a microcontroller, as it can be considered as an input through a general-purpose input/output (GPIO) port.
From a hardware perspective, the IMU sensor and microcontroller will be connected using the SPI interface, which is a 4-wire interface consisting of the nCS, SCLK, DIN, and DOUT pins. The DR pin should be connected to one of the microcontroller’s GPIOs. The IMU sensor also needs a voltage supply that is between 3 V and 3.6 V, so 3.3 V is sufficient.
Understanding the Typical Software Structure of an Embedded System
Understanding the generic software and firmware structure of an embedded system is essential to interfacing with a sensor driver. This will help the designer to build a software module that is flexible and easy enough to integrate into any project. Moreover, the driver must be implemented in a modular way, such that the designer can add higher level functions relying on existing ones.
The software structure of an embedded system is pictured in Figure 3. In Figure 3, the hierarchy begins with the application layer, which is where the application code is written. The application layer includes a main file, application modules that rely on the sensor, and modules that rely on peripheral drivers that manage processor configuration. Additionally, within the application layer, there are all the modules related to the tasks that the microcontroller has to process. For example, this includes all the software that manages a task with interrupt or polling, a state machine, and more. That layer level will be different depending on the type of project, so different projects have different codes implemented in it. Within the application layer, all the sensors of the system are initialized and configured in accordance with their data sheets. All the public functions offered by the sensor’s drivers are invokable. For example, the read of a register from which data can be output, or a procedure that is writing a register that will change a setting/calibration.
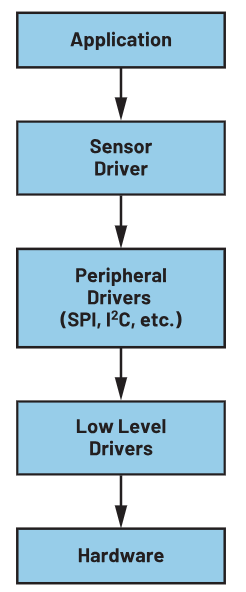
Below the application layer is the sensor’s driver layer, which has two types of interfaces. At this level, all functions invokable from the application layer are implemented. Moreover, the function’s prototypes are inserted in the driver header file (.h). So, by looking into the header file of a sensor’s driver, you can understand the driver’s interface and so its invokable functions from higher levels. The lower level layers will be interfaced with peripheral drivers that are specific and dependent on the microcontroller that manages the sensor. The peripheral drivers include all the modules that manage the microcontroller’s peripherals such as SPI, I2C, UART, USB, CAN, SPORT, etc. or modules that manage processor internal blocks such as timers, memories, ADCs, etc. They can be called low level functions because they are strictly related to the hardware. For example, each SPI driver is different considering different microcontrollers. Let’s look at the ADIS16500 as an example. The interface is the SPI, so its driver will be wrapped with the microcontroller’s SPI driver. This will be the same for different sensors and different interfaces. For example, if another sensor has the I2C interface, then similarly the wrapping with the I2C driver of the microcontroller will take place in the sensor’s initialization procedure.
Below the sensor’s driver level are the peripheral drivers, which differ for each type of microcontroller. In Figure 3, there is a split between peripheral drivers and low level drivers. In essence, the peripheral drivers offer the functions of reading and writing through the available communication protocols. Because the low level driver will manage the physical layer of the signals, there’s a strong dependence on the hardware that the designer uses. Usually peripheral and low level driver layers are generated from the integrated development environment (IDE) of the microcontroller thorough the visual tools, depending on the evaluation board on which the microcontroller is mounted.
Driver Implementation
A hardware agnostic approach enables the use of the same driver in different applications, and hence different microcontrollers or processors. This approach is dependent on how the driver is implemented. To understand the driver implementation, first, we will look at the interface, or the sensor’s header file (adis16500.h) pictured in Figure 4.

The header file contains useful public macros. This includes register’s addresses, SPI max speed, default output data rate (ODR), bitmasks, and the output sensitivity of the accelerometer, gyroscope, and temperature sensor, which are related to the number of bits (16 or 32) with which the data is represented. These macros are reported in Figure 4. Only a few register’s addresses are shown to provide an example. The code the article is referring to is available in the appendix.
Figure 3 in the appendix shows all the public variables and public type declarations that can be used by every module including the adis16500.h. Here, new types are defined to manage data more efficiently. To provide an example, the ADIS16500_XL_OUT type is defined as a structure containing three floats, one for each axis (x, y, and z). There is also an enumeration that allows the sensor to be configured in different ways, giving the designer the flexibility to choose the configuration that best suits their needs. The most interesting part here is the section that makes the driver hardware agnostic. At the beginning of the public variables part (Figure 3 in the appendix), there are three crucial type definitions: pointers to three fundamental functions, or SPI transmission and reception functions and the delay function needed between two SPI accesses to produce the right stall time. These code lines also show the prototype of the function that can be pointed to. The SPI transmission function takes a pointer to the value to be transmitted as input and it returns that can be checked to see if the transmission was successful. The same can be said for the SPI reception function that takes a pointer to a variable, as input, where the value read in reception will be stored. The delay function takes a float as input representing the number of microseconds that the designer wants to wait, and has no return (void). In that way, the designer can declare these three functions with these specific prototypes, at the application layer (in the main file for example). Once declared, they can assign the three functions to the fields of an ADIS16500_INIT private structure. To better understand this last step, an example is provided in Figure 2 in the appendix.
SPI transmitter, receiver functions, and delay function are declared as static in the main file, so at application level. They are dependent on peripheral driver functions, so the dependence on hardware is outside the sensor driver. The three functions are assigned to the fields of this variable that are pointers to functions. In this way, the designer can wrap the sensor and microcontroller without modifying the sensor driver code. If the designer changes the microcontroller, they only need to adjust the main file by substituting the low level functions inside the three static functions with the appropriate functions for the new microcontroller. This approach makes the driver hardware agnostic because the designer does not need to change the sensor’s driver code. Low level functions like spiSelect, spiReceive, spiUnselect, chThdSleepMicroseconds etc., are usually already available from the IDE of the microcontroller. In that specific case, the microcontroller evaluation board used was SDP-K1, which embeds an STM32F469NIH6 Cortex-M4 microcontroller. The IDE, indeed, was ChibiOS, which is a free Arm development environment.
Figure 4 in the appendix shows prototypes of the invokable functions from the application level. Those prototypes are in the header file of the sensor’s driver (adis16500.h), along with all the other software and firmware discussed in figures 2 and 3 in the appendix. First, there is the initialization function (adis16500_init) that takes a pointer to an ADIS16500_INIT structure as input and returns a status code indicating whether the initialization was successful. The implementation of the initialization function is done in the source file (adis16500.c) of the sensor’s driver. Figure 5 in the appendix shows the code for the adis16500_init function. First a type called ADIS16500_PRIV is defined, which contains at least all the fields of ADIS16500_INIT structure, and then a private variable called _adis16500_priv of that type is declared. Within the initialization function all the fields of the ADIS16500_INIT structure passed by the application layer will be assigned to the private variable’s fields _adis16500_priv. This means that any subsequent calls to the sensor driver will use the SPI write and read functions, and the processor delay function, that were passed in by the application layer. This is a key point because it is what makes the sensor driver hardware agnostic. If the designer wants to change the microcontroller, they only need to change the functions that they pass to the adis16500_init function. They do not need to modify the sensor driver code itself. At the beginning of the initialization function the initialized field of _adis16500_priv variable is set to false because the initialization process has not yet been completed. At the end of the function before the return it will be set to true. Every time the designer calls another public function (Figure 4 in the appendix) the following check is performed: if the _adis16500_priv.initialized is true it can proceed, if it is false it will immediately return an error called ADIS16500_RET_VAL__ERROR. This is to prevent users from calling a function without first initializing the sensor driver. Continuing with the initialization function discussion, the following steps are performed:
- Check the product ID, which is known a priori, by reading the ADIS16500_REG_PROD_ID register.
- Set the Data Ready (DR) pin polarity by writing the ADIS16500_REG_MSC_CTRL register in the appropriate bits field, with the value passed from the application layer (main.c).
- Set the sync mode by writing the ADIS16500_REG_MSC_CTRL register in the appropriate bits field, with the value passed from the application layer (main.c).
- Set the decimation rate by writing the ADIS16500_REG_DEC_RATE register, with the value passed from the application layer (main.c).
The initialization function depends on the read and write register functions (Figure 6 in the appendix). That is why the above four routines are done after the assignments to the _adis16500_priv variable. Otherwise, when the read or write register functions are called, they would not know which SPI transmitter, receiver, and processor delay functions to use.
Referring to Figure 4 in the appendix, there are other public functions that can be invoked after the initialization function. A description of the functionality of the implemented routines is given below, showing the low level ones. The second part of the article will go through details of other driver’s implemented functions. All of the following functions must be called only after the initialization function. For this reason, a double check will be done at the beginning of each function to see if the sensor has been initialized or not. If the answer is no, then the procedure immediately returns an error.
- adis16500_rd_reg_16
This function is used to read a 16-bit register. Its implementation is available at Figure 6 in the appendix. The inputs are ad that is a uint8_t variable representing the address of the register to be read and *p_reg_val that is a pointer to a variable of uint16_t type, that represents where the read value will be assigned. To do a read of a register through the SPI protocol, two SPI accesses are needed; the first to transmit the address, the second to read back the value of the addressed register. In between the two accesses a stall time is required, that is why a delay function is needed. During the first access we transmit the read/write bit, in that case is 1 (R = 1, W = 0), with the register address shifted by 8 bit plus 8 bit at 0, so the following sequence:
R/W | AD6 | AD5 | AD4 | AD3 | AD2 | AD1 | AD0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Where AD stands for address and R/W is the read/write bit.
After a delay, the function reads the value through the SPI and passes it to the input pointer. The registers of the ADIS16500 have a high address containing the high value (8 most significant bits) and a low address containing the low value (8 low significant bits). In order to get the entire value (low and high) of 16 bits it is sufficient to use the low address as ad, because the low and high addresses are consecutive.
- adis16500_wr_reg_16
This function is used to write a 16-bit register. Its implementation is available at Figure 6 in the appendix. The inputs are ad that is a uint8_t type variable representing the address of the register to be written and reg_val that is a uint16_t type variable, which represents the value to be written in the register. As for reading function low and high addresses and values are to be taken into consideration. For this reason, according to the data sheet, writing the ADIS16500’s register requires two SPI accesses in transmission. The first will send the R/W bit equal to 0 followed by low register address followed by low value, so the sequence will be the following:
R/W | AD6 | AD5 | AD4 | AD3 | AD2 | AD1 | AD0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
Where D stands for data.
The second SPI transmitter access will send the R/W bit equal to 0 followed by high register address followed by high value, so the sequence will be the following:
R/W | AD14 | AD13 | AD12 | AD11 | AD10 | AD9 | AD8 | D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 |.
The write and read register functions could actually also be defined as private and therefore not visible and invokable from outside the driver software module. The reason they are defined as public is to enable debugging. This allows the designer to quickly access any register in the sensor for reading or writing, which can be helpful for troubleshooting problems.
- adis16500_rd_acc
This function reads x, y, z acceleration data from the output data registers, and returns their values in [m/sec2]. Its implementation is available at Figure 7 in the appendix. The input is a pointer to an ADIS16500_XL_OUT structure, which simply embeds three fields: x, y, z acceleration, expressed as a float type. The way the acceleration is read is the same for all the three axis, the only differences are the registers to be read. Each axis has its own: x-axis has to be read on x-acceleration output data register, y– and z– axis accordingly. The acceleration value will be represented with a 32-bit value, so the registers to be read are two. One for the most significant 16 bits and one for the least significant 16 bits. For this reason, having a look to the code, there are two register reading accesses with appropriate shift and OR bit operations. These operations allow the entire binary value to be stored on a private int32_t variable called _temp. At this point binary to twocomplement conversion will take place. After the conversion the two-complement value is divided by the sensitivity expressed in [LSB/(m/sec2)] so that the final value will be the acceleration expressed in [m/sec2]. This value will be registered in the x, y, or z field of the pointer to the structure that has been passed as input.
- adis16500_rd_gyro
The gyroscope reading function does exactly the same as the acceleration reading function. Obviously, it will read x, y, z gyroscope data expressed in [°/sec]. Its implementation is reported in Figure 8 in the appendix. The input of the function is, as for acceleration case, a pointer to an ADIS16500_GYRO_OUT structure embedding x, y, and z gyroscope data, expressed as float type. The registers read are the gyroscope output data registers. The binary value will be represented with 32 bits, and the same steps as for acceleration are required to reach the twocomplement value. After the binary to two-complement conversion, the value will be divided by the sensitivity expressed in [LSB/(°/sec)], so that the final value will be expressed in [°/sec], and it will be registered in the x, y, or z field of the pointer to the structure that has been passed as input.
Conclusion
In this article, a typical software/firmware stack of an embedded system has been illustrated. The IMU sensor’s driver implementation was introduced. A hardware agnostic approach offers a repeatable method for various sensors or components, even if the interfaces (SPI, I2C, UART, etc.) are different. The subsequent article, “Leveraging a Hardware Agnostic Approach to Ease Embedded Systems Design: Driver Implementation,” explains the sensor driver implementation in further detail.







 combined with superior switching performance")







{kind=link}